

Fondation ISAE-SUPAERO
Découvrez OSE inGÉ et participez à ce dispositif d’accompagnement novateur pour les élèves de CPGECréé en 2022 par l’ISAE-SUPAERO, rejoint par l’ENAC en 2023 puis par l’Institut Polytechnique de Paris en 2024, OSE inGÉ s’inscrit dans les programmes d’ouverture sociale étudiante de nos écoles. Il s’agit d’un dispositif d’accompagnement en direction des élèves de classes préparatoires aux grandes écoles (CPGE) scientifiques de la région académique Occitanie.

Recherche
Valentin LELOUP, ingénieur système de télécommunications quantiques et optiques : le tandem quantique et spatialValentin Leloup, ingénieur R&D chez Thales conjugue deux domaines de prédilection : la physique quantique et le spatial. Il est diplômé ingénieur ISAE-SUPAERO 2022 et titulaire d’un Master 2 en physique fondamentale et applications.
Institut
L’ISAE-SUPAERO labellisé Développement Durable et Responsabilité Sociétale (DD&RS)L’Institut obtient le label Développement Durable et Responsabilité Sociétale (DD&RS), une reconnaissance officielle de sa stratégie environnementale et sociétale. Avec l’obtention de ce label, notre école confirme sa volonté de faire de la transition écologique et sociétale un levier d’innovation au service de la formation, de la transformation des filières industrielles et d’évolution des pratiques dans la vie quotidienne sur le campus.

Entreprise
Chaire CASTOR : L’ISAE-SUPAERO et Liebherr-Aerospace Toulouse célèbrent les 1 an de leur partenariatEn janvier 2024, l’ISAE-SUPAERO et Liebherr-Aerospace Toulouse lançaient la chaire CASTOR, une initiative ambitieuse pour améliorer la performance et la flexibilité des turbomachines radiales, des composants clés dans les systèmes de propulsion aéronautique. Un an plus tard, les deux partenaires font un premier bilan de ce projet de recherche commun.

Formation
ISAE-SUPAERO renouvelle ses accords de coopération avec l’ITA et les institutions de São PauloL’ISAE-SUPAERO a officialisé, lors de la FAPESP Week Toulouse, le renouvellement de ses accords de coopération avec l’Institut Technologique de l’Aéronautique (ITA) et plusieurs institutions de l’État de São Paulo (Brésil). Ce partenariat de longue date, fondé sur les échanges et la collaboration scientifique, vise à renforcer l’excellence et l’innovation dans la formation et la recherche en ingénierie aéronautique.

Recherche
De la modélisation à la décarbonation : la MDO comme moteur de transformation lors du 4e workshop européenL’ISAE‑SUPAERO a accueilli la 4ᵉ édition du workshop international dédié à la Conception Optimale Multidisciplinaire (MDO), un événement majeur pour la communauté scientifique et industrielle. Au cœur des échanges : des thématiques en phase avec les grands enjeux actuels, telles que la modélisation multifidélité, l’intelligence artificielle, l’optimisation environnementale et l’intégration de la durabilité dans les processus de conception.

Recherche
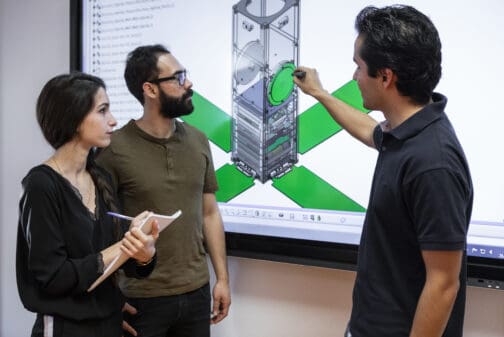
Capter l’activité sismique d’un astéroïde : notre rendez-vous sur ApophisLes contributions scientifiques des chercheurs de l’ISAE-SUPAERO se poursuivent pour la conception du premier sismomètre qui sera déployé sur un astéroïde par la mission Ramses de l’ESA.
Recherche
Former aux nouvelles compétences pour le futur du spatial : COMETES est lancé !Le projet COMETES pour COmpétences et MEtiers pour l’Espace est un programme national porté par la Communauté d’universités et établissements de Toulouse. Coconstruit par 26 partenaires de cinq régions françaises, ce consortium a été créé dans le cadre de l’appel à manifestation d’intérêts « Compétences et Métiers d’Avenir » du dispositif France 2030 dont il est lauréat.

Formation
Admissibles 2025 : toutes les infos !Tout d’abord, félicitations pour votre admissibilité, nous vous souhaitons le meilleur pour les oraux et espérons vous retrouver à la rentrée sur notre campus. Bienvenue sur l’espace admissibles, il vous est dédié : vous y retrouverez toutes les informations pour faire votre choix !

Institut
Lancement du nouveau site de l’ISAE-SUPAERO : notre vitrine au service de l’excellence !Nous sommes fiers de vous présenter notre tout nouveau site internet, pensé comme un véritable reflet de l’ISAE-SUPAERO : une école d’ingénieurs d’excellence au rayonnement international. Plus qu’un simple outil de communication, ce site est une porte d’entrée vers notre univers — celui de l’innovation aérospatiale, de la recherche de pointe et d’une formation tournée vers les grands enjeux de demain.
Evénement
L’ISAE-SUPAERO sera au Salon International de l’Aéronautique et de l’Espace au Bourget du 16 au 22 juin 2025 !L’ISAE-SUPAERO sera présent au 55ᵉ Salon International de l’Aéronautique et de l’Espace au Bourget du 16 au 22 juin 2025 !
Recherche
Un protocole choisi pour sécuriser les communications face aux ordinateurs quantiquesLe NIST (National Institute of Standards and Technology), organisme de normalisation américain, a sélectionné HQC (Hamming Quasi-Cyclic), un protocole développé par des chercheurs de l’ISAE-SUPAERO, de l’ENAC et de l’Université de Limoges, pour faire face aux futures menaces des ordinateurs quantiques. Ce protocole devrait permettre d’assurer la sécurité des échanges numériques pendant des décennies.
